Modern scanning sonar has transformed the way anglers, divers, and cruisers see the underwater world. Where traditional sonar returns blobs and arches that require years of experience to interpret, today’s side-scan sonar, CHIRP fishfinders, 3D sonar, and steerable transducers produce near-photographic images that reveal fish, structure, and bottom composition with extraordinary clarity. This guide walks through each major sonar technology type — how it works, what it shows, and which brands lead each category — so you can choose the right system for your boat and fishing style.
- Photo-realistic scanning sonar imagery
- Traditional sonar vs. scanning sonar
- Multi-window fishfinder displays
- Three-dimensional scanning sonar
- Steerable 3D sonar transducers
- Scanning sonar FAQ
Photo-realistic scanning sonar imagery

Raymarine’s Axiom combo fishfinders introduce gyro stabilization, compensating for boat motion to produce clearer, more lifelike 3D scanning sonar images even in choppy conditions.
Scanning sonar produces near-photographic quality underwater images by sweeping a narrow beam of very high-frequency energy — often 455kHz or 800kHz — from side to side or downward. Unlike the cone-shaped beam of traditional sonar, scanning sonar creates precise “slices” that are combined into highly detailed images. Views like these help fishermen and divers find structure, wrecks, and other underwater features far more precisely than was ever possible with conventional sonar.
The physics behind this is straightforward: sonar resolution is directly proportional to frequency. A 200kHz beam has a wavelength of approximately 7.5mm in water, while an 800kHz beam has a wavelength of less than 2mm. The shorter the wavelength, the finer the detail the returning echo can resolve. This is why scanning sonar at 800kHz can distinguish individual fish from a school and reveal the texture of bottom structure — rocks vs. sand vs. gravel — while a 200kHz traditional sonar shows the same area as a featureless gray band.
Raymarine’s Axiom combos take this further with gyro stabilization, which compensates for boat motion to maintain image clarity in rough water or during turns. Without gyro stabilization, boat roll and pitch introduce positional errors into the composite image that smear fine details — particularly noticeable at speed when the transducer is deflecting through the water. The gyro sensor measures the boat’s actual orientation at each sonar ping and applies a correction to the image slice, keeping the composite picture geometrically accurate regardless of wave action.

Raymarine’s CP200 Sonar Module with CHIRP SideVision™, combined with the CP100 DownVision module, delivers a 180-degree underwater view. SideVision beam angles are adjustable for shallow or deep water.
Traditional sonar vs. scanning sonar
To appreciate what scanning sonar delivers, it helps to understand what traditional sonar cannot. A conventional fishfinder operates at lower frequencies — typically 50kHz and 200kHz — with a cone-shaped beam of 20 degrees or less. Fishing in 10 feet of water, that cone covers a bottom diameter of roughly 3 feet. A fish has to swim directly into that narrow beam to appear on your display at all.
The cone angle also creates a fundamental limitation for structure identification. Because the beam illuminates a roughly circular footprint, returns from the edges of that footprint arrive at the transducer at the same time as returns from the center — the display cannot distinguish between a fish hanging at mid-depth in the center of the beam and a fish resting on a ledge at the edge of the beam. What appears as a floating fish arch on traditional sonar may actually be structure sitting to the side of the boat.
When a school of fish passes below the boat, traditional sonar shows a red blob. With experience, you might interpret that blob as a school of small forage fish based on water temperature and location — but it remains a guess. Some scanning sonar models extend coverage with three beams looking down and to both sides, producing a wide (180-degree) and very thin (1.5 to 3 degree fore-and-aft) beam pattern. The narrow fore-and-aft dimension is key: it eliminates the ambiguity about where in the beam pattern a return originates. Every return from a scanning sonar beam comes from a precisely defined angular position, which is why the composite image has photographic clarity.

Lake Murray bridge captured with Garmin ClearVü (left) and SideVü (right) scanning sonar at 455kHz, enhanced by CHIRP technology — the difference in resolution vs. traditional sonar is immediate.
Scanning sonar resolves that red blob into individual white dots — a school of small baitfish — and can even reveal a pack of predator fish attacking from below. The core principle: higher frequencies deliver better clarity and resolution but do not penetrate as deeply as lower frequencies. The Lowrance StructureScan HD, for example, has a maximum side-scan range of 600 feet at 455kHz while trolling at 2 to 8 mph, with a maximum depth of 300 feet. That is two football fields of bottom coverage on each side of your boat simultaneously — exponentially more than conventional sonar covers on a single pass.
This technology excels for locating structure in shallow water: brush piles, docks, channels, ledges, humps, and bottom transitions where fish concentrate. Spot something interesting on the display and you can instantly mark a GPS waypoint for later — then move in quietly and make your presentation without having driven directly over the fish.
Understanding the tradeoff between frequency and depth penetration is important for selecting the right scanning sonar for your fishing environment. In clear, shallow freshwater environments (under 30 feet), 800kHz delivers the best image resolution and is the preferred setting. In deeper water or offshore, 455kHz provides better penetration while still delivering far superior resolution to traditional sonar. On coastal and offshore fisheries where you are scanning depths beyond 200 feet, traditional 50/200kHz sonar still has a role for deep water where high-frequency scanning cannot reach.
Multi-window fishfinder displays

A Lowrance SonarHub module networked with an HDS Gen3 display shows side-scan sonar across the bottom, down-scan upper right, and CHIRP sonar upper left — all simultaneously on one screen.
Modern fishfinder displays allow you to run multiple sonar views simultaneously on a single screen. Side-scanning sonar fills the full width of the screen, traditional 50/200kHz sonar — still the gold standard for displaying big fish arches in the classic format most anglers recognize — occupies another window, and down-looking scanning sonar fills a third. You customize the layout with drag-and-drop motions on the touchscreen.
The multi-window approach matters because each sonar mode tells you something different. Side-scan shows you what is to the left and right of the boat in a wide horizontal view, ideal for covering ground efficiently. Down-scan (also called DownVü, DownVision, or StructureScan depending on the brand) shows a narrow, highly detailed slice of the water column directly beneath the hull, revealing fish suspended at specific depths near structure. Traditional CHIRP sonar shows fish arches with the classic vertical scrolling display that experienced anglers have always used to identify individual large fish. Having all three views simultaneously means you can use side-scan to locate promising structure, down-scan to confirm fish are present at that specific spot, and traditional sonar to watch individual fish arches as you position for a cast.
Some fishfinders combine high-frequency imaging with CHIRP technology. CHIRP (Compressed High Intensity Radar Pulse) transmits a continuous sweep of frequencies rather than a single frequency pulse, delivering greater target separation, improved depth penetration, and clearer imaging of both fish and structure. Because CHIRP transmits more total energy into the water column, it delivers further gains in range and clarity beyond what either technology achieves alone. The result is a complete picture of what is happening beneath your hull at any moment — fish arches, bait schools, structure detail, and depth contours all visible at once.
Side-scanning sonar is here to stay and continues to evolve. Whether you use CHIRP or not, it is one of the most effective tools available for locating fish in water up to 600 feet deep.
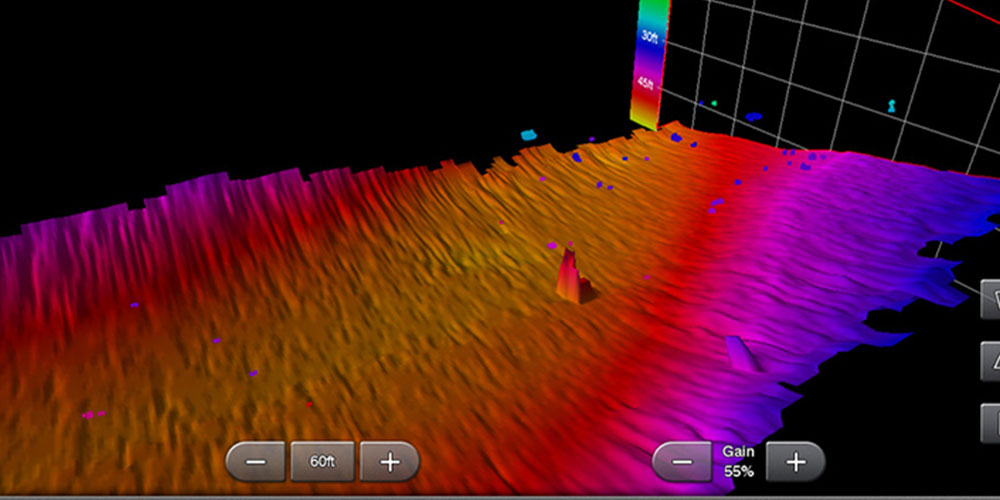
Three-dimensional scanning sonar

Garmin Panoptix™ RealVü 3D Historical mode shows the entire water column you have passed over in three dimensions — from the bottom to the surface and every fish in between. Uses the Panoptix PS30 Down transducer.
The most advanced category of 3D scanning sonar operates at high frequencies but adds a multi-beam transducer with multiple receiving elements to build true three-dimensional, 180-degree high-resolution images. The Lowrance StructureScan® 3D sonar module and the Garmin Panoptix™ PS30 Down Transducer are leading examples. You can pan, tilt, and rotate the 3D image on screen to change perspective — the images are intuitive enough to interpret without sonar experience. You can even watch your lure and the fish inspecting it in real time.
The mechanism that makes 3D sonar possible is phased array transducer technology. Rather than a single transmitting and receiving element, a 3D transducer has multiple elements arranged in a grid pattern. By analyzing the timing differences between when the same echo arrives at different elements, the transducer’s processor can calculate the precise three-dimensional angle of each returning target. This is the same principle used in medical ultrasound imaging and radar systems. The result is a full volumetric representation of the underwater environment rather than a two-dimensional cross-section.
Garmin Panoptix takes this further with multiple operating modes that serve different fishing scenarios. LiveVü Down shows a live view directly below the boat in real time, with fish movement visible as it happens — you can watch a bass move from cover toward your descending jig and adjust your retrieve accordingly. LiveVü Forward shows live movement in front of the boat out to approximately 200 feet, allowing real-time sight fishing for any species visible from the surface. RealVü 3D Historical builds a three-dimensional map of the bottom you have passed over, which you can rotate and examine from any angle to understand structure topography that a two-dimensional side-scan image flattens into a single plane.
3D scanning sonar makes it easy to understand exactly where fish and fish-holding structure are positioned relative to your boat. By slowly idling over a potential fishing area with the wide 180-degree scanning range, you can rapidly cover abrupt depth changes, points, ditches, rock piles, brush piles, weed beds, standing timber, and wrecks — then return precisely to anything worth fishing.
Steerable 3D sonar transducers

The Simrad ForwardScan® thru-hull transducer aims ahead of your bow and displays color-coded depth: green for safe water, yellow for caution, red for dangerous shoaling.
No overview of sonar technology is complete without steerable transducers. Units like the Simrad ForwardScan® and Garmin Panoptix™ PS31 Forward Transducer let you aim the sonar beam in any direction — like a periscope looking down into the water ahead of and alongside your boat.
Some steerable models mount on a trolling motor, turning with the motor to point the beam wherever you aim. This configuration is particularly valuable for bass anglers who are working the trolling motor to position the boat — the sonar shows what is ahead of the direction of travel, allowing precise boat placement on cover without disturbing it with the hull shadow or hull pressure wave. The Garmin Panoptix PS51 is designed specifically for trolling motor installation, with a built-in transducer that connects to a compatible Garmin chartplotter and delivers real-time live forward sonar as the trolling motor steers.
Others, like the ForwardScan, are thru-hull transducers mounted near the bow, with beam steering handled inside the multi-element transducer itself. Beyond finding fish, these units are invaluable for navigation in narrow or winding channels — seeing rocks and shallows before you reach them. ForwardScan displays color-coded depth indicators: green for deep water, yellow for medium depths, and red for dangerous shoals. It connects via NMEA 2000 with compatible Simrad and B&G displays, making it a popular choice not just for anglers but for cruising sailboat and cabin cruiser owners who want advance warning of shallow water in unfamiliar anchorages and channels.
The NMEA 2000 integration is significant: ForwardScan data can feed into an autopilot system, allowing the autopilot to receive depth-ahead data alongside the GPS and heading information it already uses. Some installations use this to automate slow-speed harbor approaches in areas where the chartplotter basemap resolution is insufficient to reliably identify shoaling areas that appear between waypoints.
Browse West Marine’s full selection of fishfinders and sonar systems from Garmin, Lowrance, Raymarine, and Simrad, or visit your local store for hands-on advice from our electronics-certified crew.
Scanning Sonar and CHIRP Imaging FAQ
Scanning sonar uses narrow, high-frequency beams (455kHz or 800kHz) swept side-to-side or downward to produce near-photographic underwater images. Traditional sonar uses a wider, lower-frequency cone beam (50kHz or 200kHz) that returns basic arches and blobs requiring experience to interpret. Scanning sonar’s narrow fore-and-aft beam eliminates ambiguity about where in the beam a return originates, which is why the composite image has photographic clarity while traditional sonar is vague about lateral position.
CHIRP (Compressed High Intensity Radar Pulse) transmits a continuous sweep of frequencies rather than a single frequency tone. This delivers greater target separation — the ability to distinguish closely spaced fish as individuals rather than blending them into a single blob — improved depth penetration, and clearer imaging of both fish and structure. Because CHIRP transmits more total energy into the water column per ping, the returning echo carries more information. The result is noticeably better resolution at the same depth compared to single-frequency sonar.
3D sonar uses phased array transducer technology — multiple transmitting and receiving elements arranged in a grid. By analyzing timing differences between when the same echo arrives at different elements, the processor calculates the precise three-dimensional angle of each return. This builds a full volumetric representation of the underwater environment that can be rotated and examined from any perspective on screen. Leading examples include the Lowrance StructureScan 3D and Garmin Panoptix PS30.
Gyro-stabilized sonar, used in Raymarine Axiom combos, uses a gyroscope sensor to measure the boat’s actual orientation at each sonar ping and applies a geometric correction to each image slice before compositing. Without gyro stabilization, boat roll and pitch introduce positional errors that smear fine details — especially at speed or in chop. The gyro correction keeps the composite image accurate regardless of wave action.
Each sonar mode tells you something different: side-scan covers wide horizontal ground for locating structure, down-scan shows a detailed narrow slice directly beneath the hull at specific depths, and traditional CHIRP shows classic fish arches for identifying individual large fish. Having all three simultaneously means you can use side-scan to locate structure, down-scan to confirm fish presence, and traditional sonar to watch individual arches as you set up a cast — without switching screens.
Side-scanning sonar sweeps outward in both directions at up to 600 feet per side at fishing speeds, allowing you to identify fish-holding structures — ledges, brush piles, channels, wrecks — without driving directly over them. This preserves stealth and dramatically increases the area you can cover per hour compared to traditional sonar. When you spot something worth fishing, you drop a GPS waypoint from the display and return precisely to that spot without re-scanning.
Steerable sonar transducers like the Simrad ForwardScan and Garmin Panoptix PS31 and PS51 allow the sonar beam to be aimed in any direction without repositioning the boat. Trolling motor-mounted versions point where the motor aims; thru-hull versions steer the beam electronically inside the multi-element transducer itself. Uses include spotting obstacles ahead in channels, finding secure anchorages in unfamiliar waters, and tracking fish ahead of the vessel in real time.
Yes. Higher frequencies (455kHz, 800kHz) produce shorter wavelengths, which resolve finer detail. 800kHz is preferred in shallow fresh water under 30 feet for maximum clarity. 455kHz penetrates deeper and is better for water over 30 feet. Lower frequencies (50kHz, 200kHz) reach deepest but produce coarser images. Most modern fishfinders allow switching between or combining frequencies depending on water depth and target type.
Yes. Scanning sonar clearly resolves baitfish as clusters of small, bright dots and predator fish as larger, distinct returns with different acoustic characteristics. With CHIRP and 3D imaging, you can observe predator movement and bait reaction in real time, including watching a predator fish move from cover toward your lure as you work it — something traditional sonar’s blobs and arches cannot reveal.
When scanning sonar reveals a promising structure, fish school, or underwater feature, you can instantly create a GPS waypoint directly on your chartplotter display. On integrated fishfinder/chartplotter combos like the Garmin ECHOMAP, Lowrance HDS, or Raymarine Axiom, the waypoint is dropped at the GPS coordinates of the structure — not the boat’s current position — because the system knows the side-scan image represents a position to the side of where the boat was when it recorded that slice. This precise positioning allows you to return and anchor or drift exactly on the spot rather than searching again.